GRIPPLANNING rendszer
DÍJAZOTT szoftvercsomag a robotokkal végzett manipulációs feladatokhoz szükséges helyzet- és fogási pontok automatizált kiszámításához. (Handling Award 2016)
A problémamegoldó és alkalmazási területei:
Szabadon elhelyezett, összetett vagy szerves alakú alkatrészek betanítása, nagy tárgyváltozatosság mellett, automatizált „Pick & Place” alkalmazásokhoz. Egyszerű alkatrészek esetén is alkalmazható, nagy változatosság mellett.
Ez is érdekelheti Önt:
- Az alkatrészek kézi előzetes beállítása és igazítása nem szükséges
- Az automatikus betanítási folyamat jelentősen csökkenti az időigényt és a kézi hibák számát
- Bármely 3D-adatkészlet „betanítása” a legkülönbözőbb alkalmazási esetekhez
- Robotokhoz használható, kalibrálható fogószerszám kis alkatrészekhez (hajlított szívófej)
- Rugalmasan igazítható az ügyfélspecifikus fogógeometriákhoz
Jellemzők
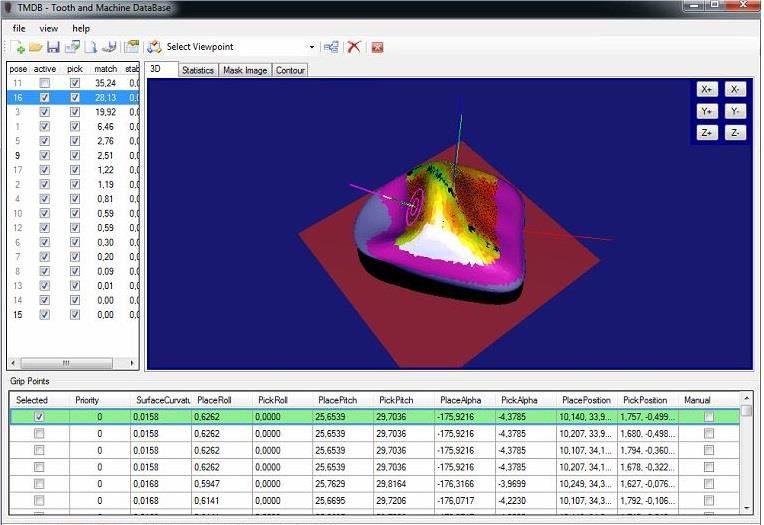
A lehetséges stabil helyzetek és fogási pozíciók teljesen automatikus előzetes kiszámítása a CAD-geometria alapján
Szükség esetén manuális optimalizálás lehetséges alternatív fogási pozíciók kiválasztásával
A Pick & Place pozicionáló rendszerekből származó statisztikák a helyzetről, a bekövetkezés valószínűségéről és a Pick & Place minőségéről
REFERENCIAPROJEKT
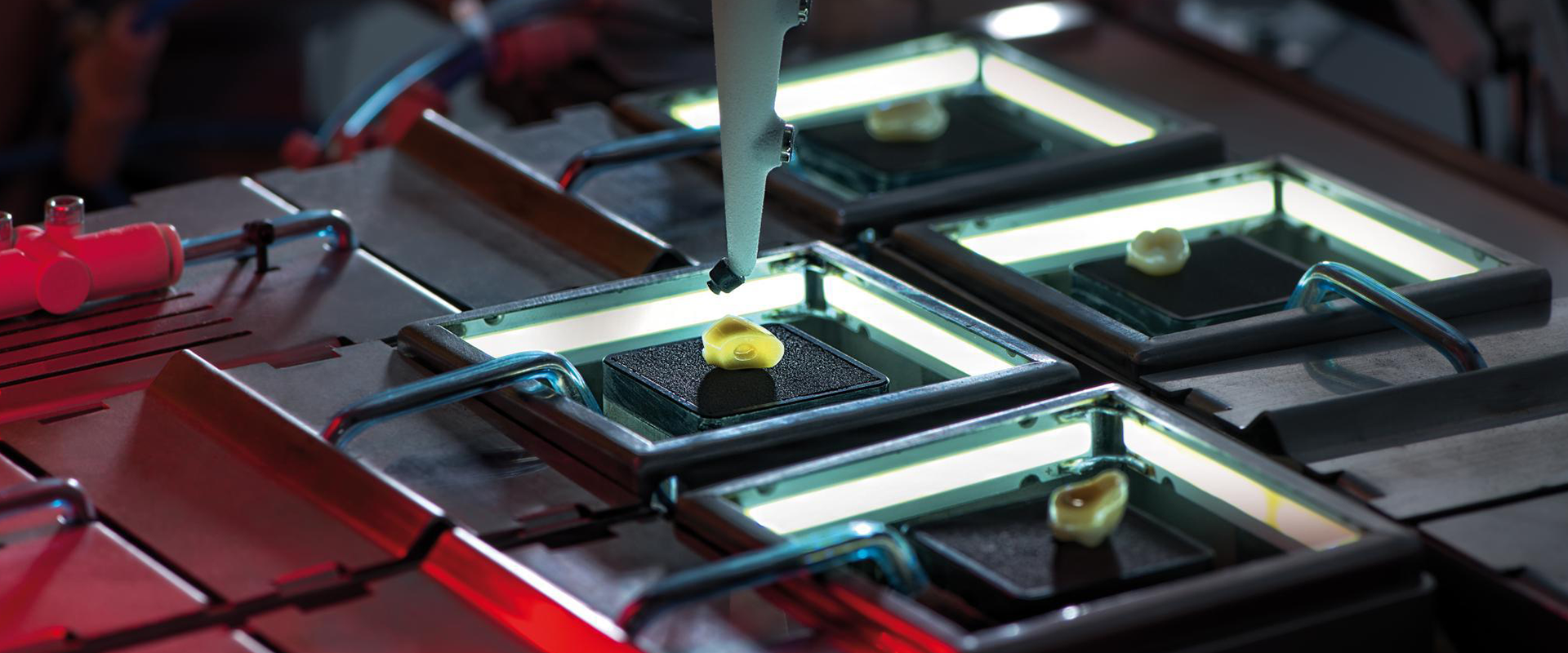
TMM© – Fogbeültető gép
(2925254. számú európai szabadalom és BR 11 2015 012500 0. számú brazil szabadalom)
A fogpótlások megmunkálása
Több száz különböző alakú fogmodell, amelyek számos stabil réteget tartalmaznak, kevesebb mint 2 másodperces ciklusidő alatt pontosan a megfelelő helyre kerülnek egy ellenformába.
Készen állunk az Ön projektjére!
Még akkor is, ha nem gyártanak fogakat!
Milyen összetett kihívást valósíthatunk meg Önnek a Gripplanning szoftverlicenc segítségével?
Vegye fel azonnal a kapcsolatot Harald Unterrainerrel.
Ez is érdekelheti Önt:

Gyakran feltett kérdések (GYIK)
Gripplanning – mi ez és hogyan alkalmazzák?
A robotrendszerekben az alkatrészek helyzetének felismerésére szolgáló rendszerek elengedhetetlenek a folyamatok automatizálásához.
A Gripplanning egy olyan rendszer, amely automatikusan kiszámítja a helyzetet és a fogási pontokat a robotokkal végzett manipulációs feladatokhoz. Nincs szükség az alkatrészek kézi előzetes tájolására és beállítására. Az automatikus betanítási folyamat jelentősen csökkenti az időigényt és a kézi hibák számát.
Működik-e a Gripplanning nagy alkatrészválaszték esetén, komplex, organikus és szabad formájú alkatrészeknél?
Igen! Ha a gyártási folyamatában rendkívül sokféle, komplex, szerves vagy szabad formájú alkatrész szerepel, a „kézi betanítás” gyakran nem hatékony. A Pick & Place területén rendelkezünk az Ön számára megfelelő automatizálási megoldással, amellyel automatizáltan betaníthatja az alkatrészeket, majd azokat válogathatja és Pick & Place segítségével mozgathatja. A WESTCAM-Gripplanning©szoftver támogatja ezeket a folyamatokat.
Cégük már használ fogórobotokat – szeretnének többet megtudni a Gripplanning előnyeiről?
Bármikor szívesen! Ingyenes tanácsadásra állunk rendelkezésükre. Vegye fel velünk a kapcsolatot még ma! Örömmel várjuk Önöket!
Személyesen adunk tanácsot!
Örömmel állunk rendelkezésükre
